So you have a nice, nifty RC car which is shiny and very fast (and therefore cool) or dirty and really slow (and therefore cool) and yet you are unhappy with its turning radius?
You might consider rigging it for four-wheel steering, which is very nice for tight turns but not so much fun or stable for high-speed runs. Which do you choose, stability and 2WS or tight turns and 4WS? Can't one have both?
Indeed you can. Faced with this very challenge for my Wheely-King-based rock crawler, I've built a four-wheel steering controller (4WSC) which gives you that choice and lots more, provided that you have a radio with one free channel: with that channel you can switch between proportional four-wheel steering, two-wheel steering front or rear and crabbing, on the go and without stopping. Your one steering wheel controls both servos appropriately, based on your chosen mode of operation. The 4WSC also includes a servo reversing cabability for your year servo and is configured/programmed using your rc transmitter.
You might have a look at the manual to see what other goodies I managed to program in.
Here is what the 4WSC looks like: tiny (that's a 1cm grid) but quite capable and cool.

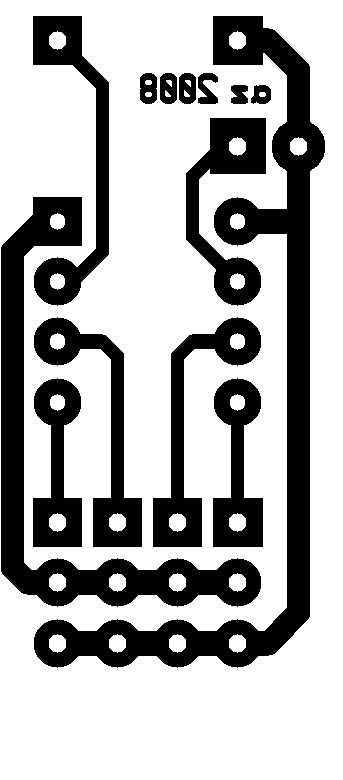
As always with my stuff, it's open source software: the commented source code is available right here for your perusal/modifications/other weird applications. Share and Enjoy. You might almost call the 4WSC an example of "open source hardware": I'm also providing a printable circuit board design, ready for making your own pcb's with the toner transfer method.
The hardware side of the 4WSC is really simple: it is microcontroller-based, uses a PIC12F635 or 12F683 or similar, and because PICs are great devices it does not need any external components (except for plugs/leads and a buzzer). All you need to build your own is such a microcontroller, a PIC programmer interface for programming it, soldering gear and either some protoboard or minimal PCB-making skills.
If that sounds too tedious/complicated, you can simply pay me a little money and get one finished and ready: I made a few of the controllers and am sufficiently happy with the outcome to sell them. Contact me here and we can discuss the details; I might also do custom firmware for your specific requirements (for a fee, mind you).
For the do-it-yourself afficionados (like me) here are the goodies:
- The manual for the 4WSC
- The latest version of the source code and the delay functions code
- The circuit board design (600dpi png)
{kind=link}
Enjoy!